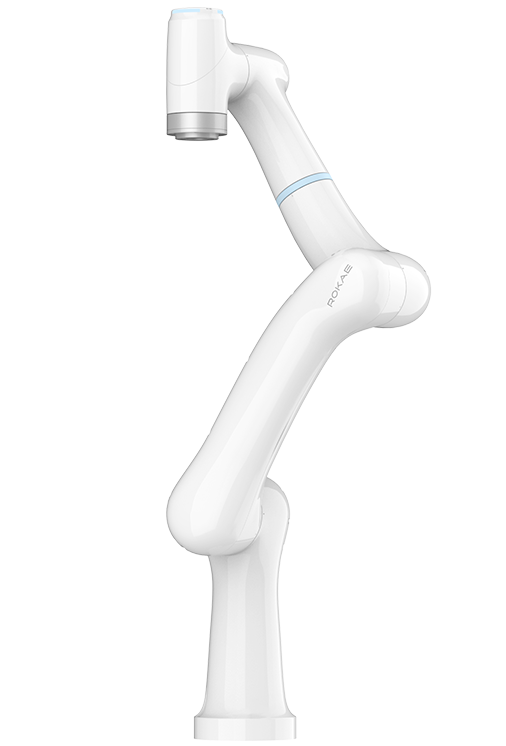
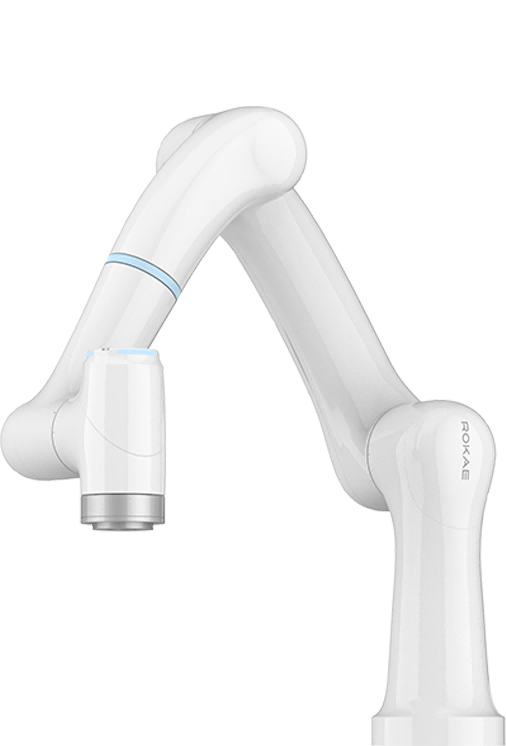
SR-C Series Collaborative Robots
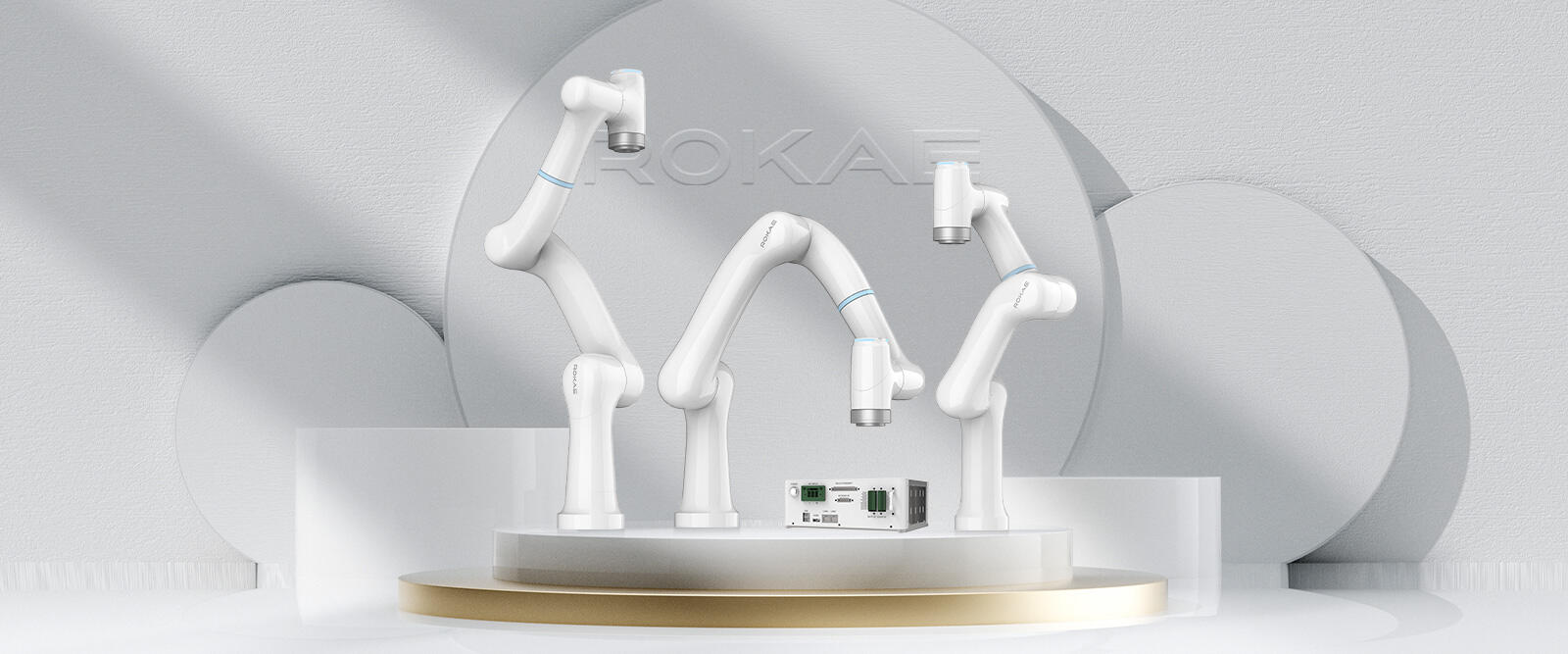
Expanding upon the distinctive features and core advantages of the xMate SR flexible cobot, the xMate SR-C takes it a step further by relocating the controller to create an independent controller cabinet. This design caters to more confined base installation environments. Furthermore, the xMate SR-C undergoes a comprehensive upgrade, now supporting a 5 kg payload capacity.
SR-C Series
Request A Demo