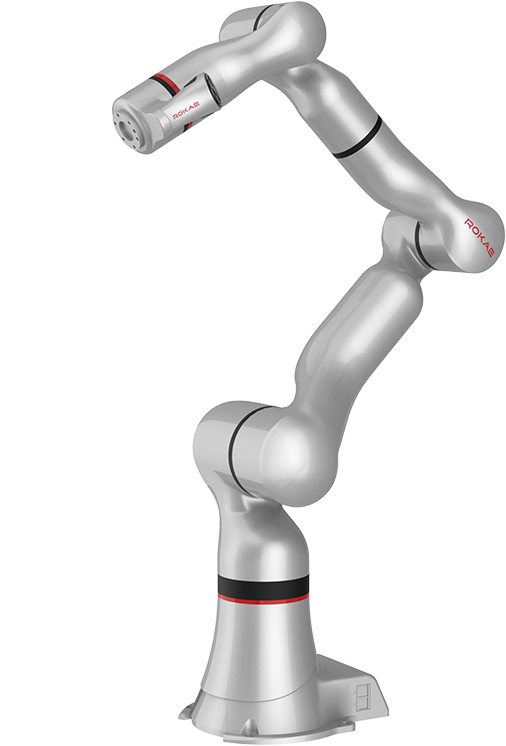
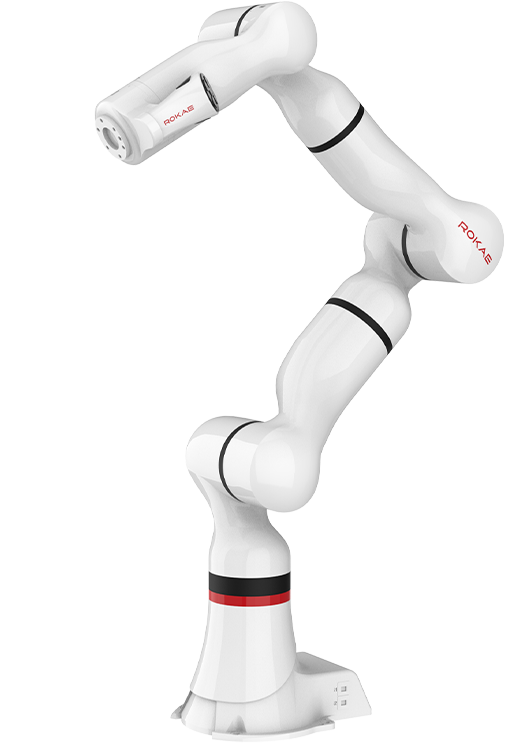
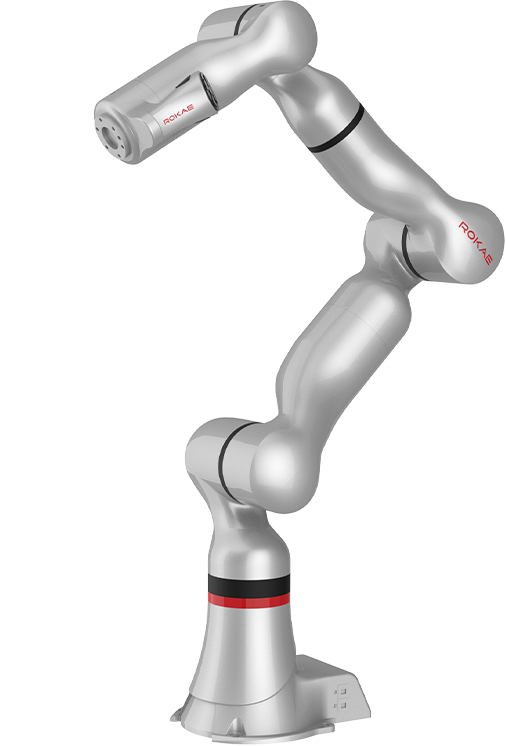
ER協働ロボット

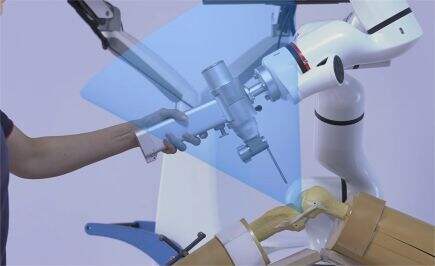
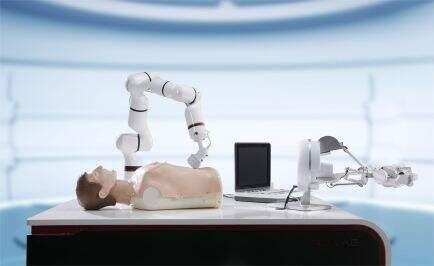
ERシリーズフレキシブル協働ロボットは、全軸にトルクセンサを備えています。完全な状態フィードバックを備えた力制御技術により、柔軟な障害物回避、高感度な働突検出が可能です。高度で動的な力制御とコンプライアンス制御だけでなく、高精度な位置制御も兼ね備えています。
実用的なダイレクトティーチング方式とRLプログラミング言語は、シンプルで包括的なプログラミングを提供し、オープンなRCIによるプログラミングは、教育や研究、自動プロセスの開発など、ハイエンドユーザのニーズを満たします。
実用的なダイレクトティーチング方式とRLプログラミング言語は、シンプルで包括的なプログラミングを提供し、オープンなRCIによるプログラミングは、教育や研究、自動プロセスの開発など、ハイエンドユーザのニーズを満たします。
お問い合わせ ERシリーズ
デモ機の申し込み